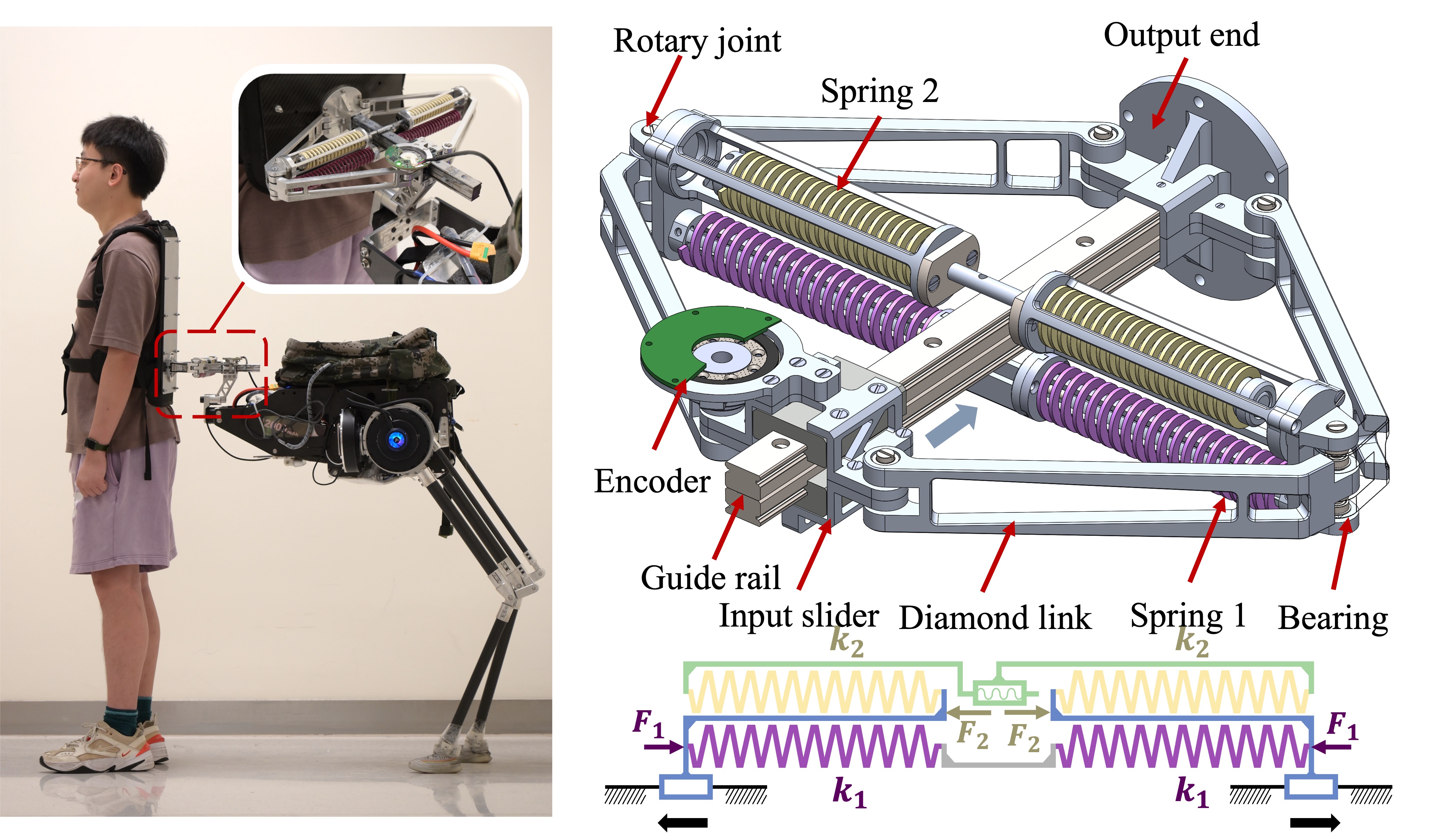
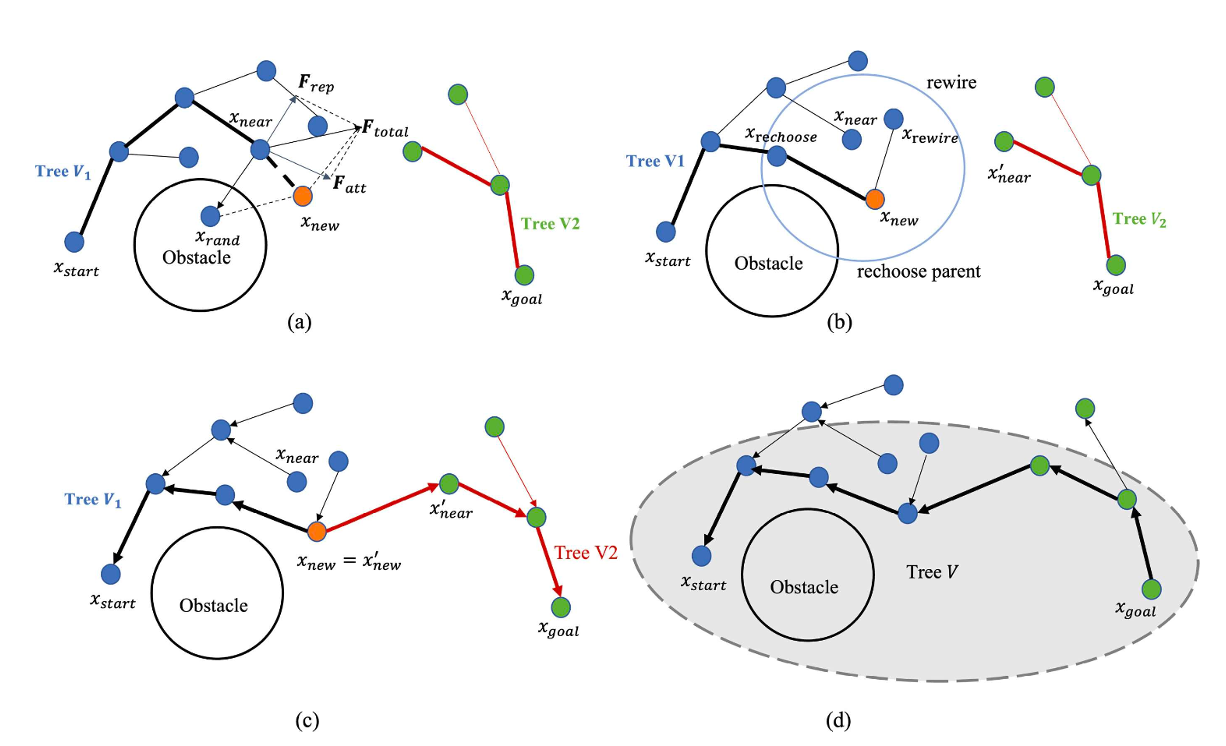
2026 Design, modeling, control, and evaluation of a wearable Centaur robot for load-carriage walking assistance Zhixin Tu, Yihao Jiang, Haoyun Yan, Yuquan Leng, and Chenglong Fu The International Journal of Robotics Research, 2026 PDF Website 2024 Softening nonlinear-stiffness elastic mechanism with continuous adjustability for human–robot interaction force control Zhixin Tu, Haifeng Liu, Yihao Jiang, Tao Ye, Yuepeng Qian, Yuquan Leng, Jian S Dai, and Chenglong Fu Mechanism and Machine Theory, 2024 PDF Website Locomotion control on human-centaur system with spherical joint interaction Haoyun Yan, Jianquan Li, Haifeng Liu, Zhixin Tu, Ping Yang, Muye Pang, Yuquan Leng, and Chenglong Fu IEEE Robotics and Automation Letters, 2024 Website 2023 Task-based human-robot collaboration control of supernumerary robotic limbs for overhead tasks Zhixin Tu, Yijun Fang, Yuquan Leng, and Chenglong Fu IEEE Robotics and Automation Letters (presented at ICRA 2024), 2023 PDF Video Website Accelerated Informed RRT*: fast and asymptotically path planning method combined with RRT*-connect and APF Zhixin Tu*, Wenbing Zhuang*, Yuquan Leng, and Chenglong Fu In International Conference on Intelligent Robotics and Applications, 2023 PDF Website
 Locomotion control on human-centaur system with spherical joint interactionIEEE Robotics and Automation Letters, 2024
Locomotion control on human-centaur system with spherical joint interactionIEEE Robotics and Automation Letters, 2024