涂志鑫





欢迎访问我的个人主页!
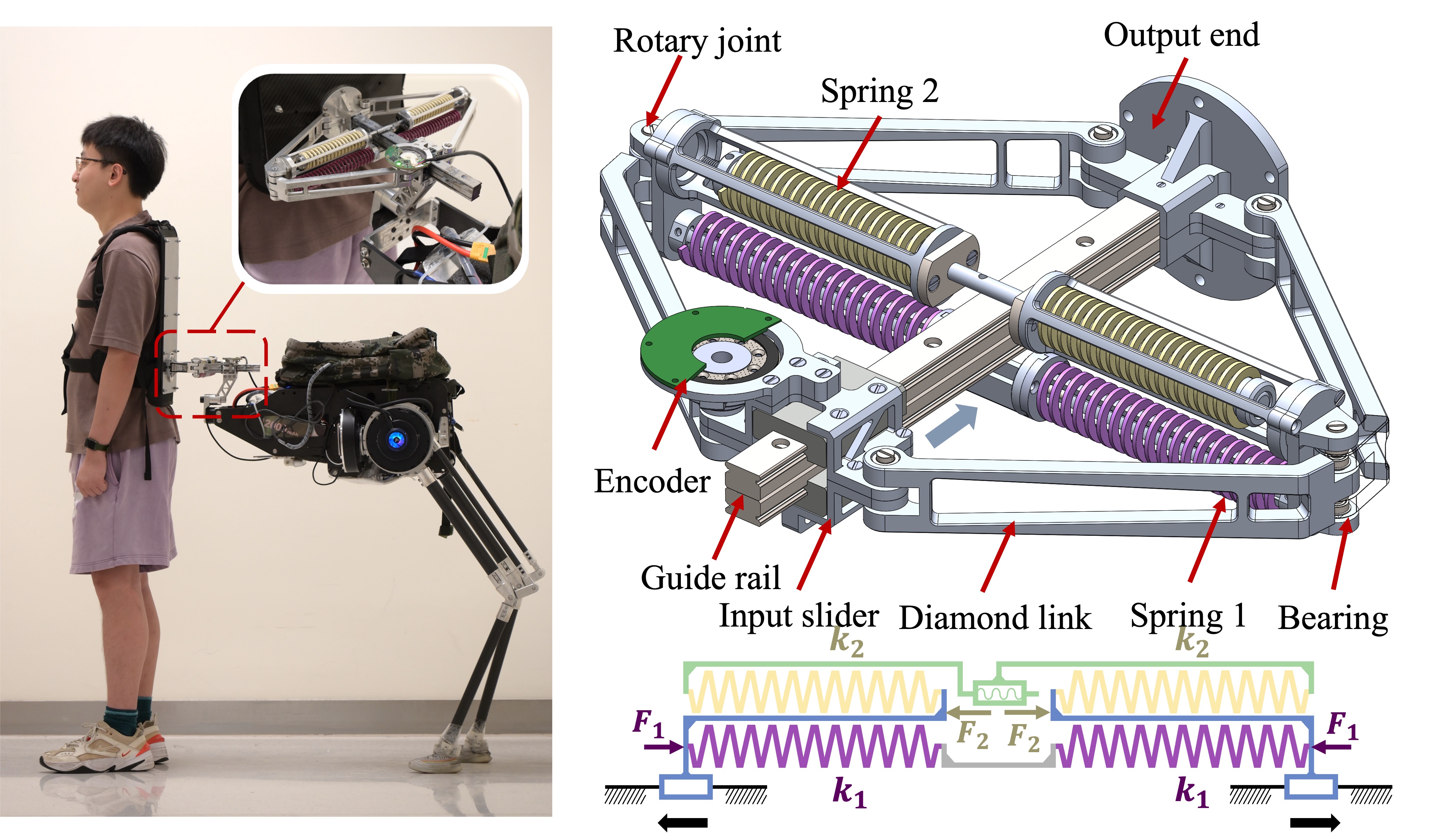
我是南方科技大学(SUSTech)博士研究生,师从付成龙教授。我的研究聚焦于足式机器人行走控制、可穿戴机器人和人体增强的交叉领域。在博士期间,我设计并搭建了一个可穿戴足式机器人系统——半人马机器人(Centaur robot),旨在降低人类负重行走的新陈代谢成本。我的研究主要涉及机器人系统设计、人机交互和基于模型和强化学习运动控制。更广泛的来说,我对腿式机器人(包括人形和四足机器人)、具身智能系统、可穿戴机器人等方向感兴趣。
我还在妙动科技担任强化学习算法工程师,负责轮腿机器人的强化学习运动控制算法开发,合作导师为杨硕。
研究兴趣
- 足式机器人行走控制
- 强化学习
- 人机交互
- 人体增强
- 可穿戴机器人
我目前正在寻找大学\研究机构的博士后或者正式研究职位,特别是在具身智能、腿式运动/操作、可穿戴机器人和人体增强领域。我很乐意与大家讨论研究合作、学术交流等机器人领域有趣问题。
教育背景
News
| Feb 16, 2026 | 有关于半人马负重辅助机器人的相关成果“Design, Modeling, Control, and Evaluation of a Wearable Centaur Robot for Load-carriage Walking Assistance”被南方科技大学新闻网报道。阅读更多 |
|---|
学术成果
-
 Locomotion control on human-centaur system with spherical joint interactionIEEE Robotics and Automation Letters, 2024
Locomotion control on human-centaur system with spherical joint interactionIEEE Robotics and Automation Letters, 2024
研究项目
助教经历
学术服务
- 期刊审稿人 IJRR, T-RO, TASE, RAL,
- 会议审稿人 ICRA, IROS, ICDL, ICIRA