Zhixin Tu





Welcome to my personal homepage!
I am a final-year PhD candidate at Southern University of Science and Technology (SUSTech) advised by Prof. Chenglong Fu.
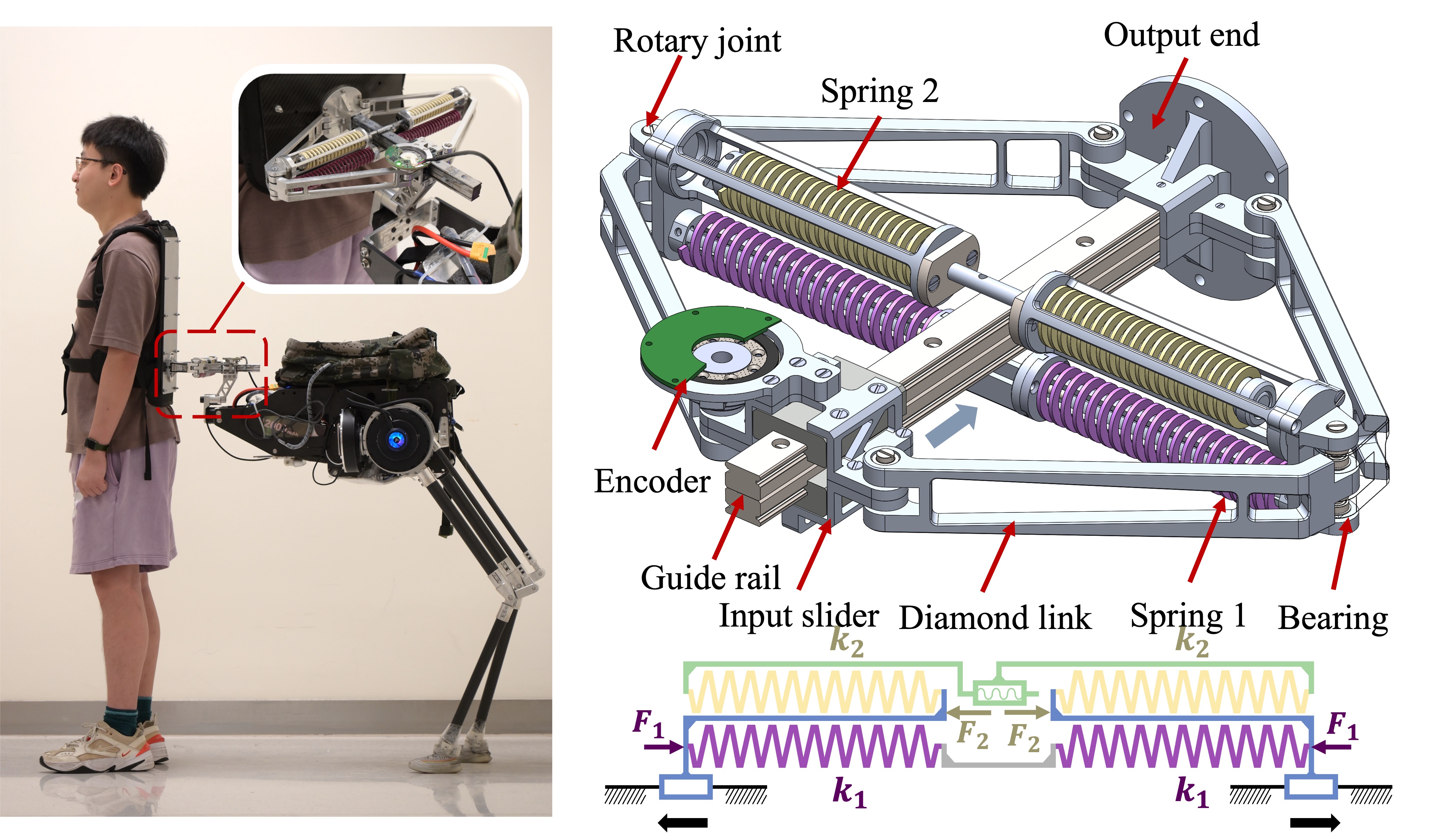
My research lies at the intersection of legged locomotion, wearable robotics, and human augmentation. During my Ph.D., I designed and built a wearable legged robotic system, the Centaur robot, aimed at reducing the metabolic cost of human load-carrying. My research integrates robotic system design, human-robot interaction, and reinforcement learning–based locomotion control. More broadly, I am interested in embodied intelligence and model/learning-based control for legged robots, including humanoid and quadruped platforms.
I am also working part-time as a Reinforcement Learning Algorithm Engineer at Mondo Robotics, where I focus on locomotion algorithm development for wheeled-legged robots, under the mentorship of Shuo Yang.
Research Interests
- Legged locomotion
- Reinforcement learning
- Human-robot interaction
- Human augmentation
- Wearable robots
I am open to postdoctoral positions and research roles at universities or research institutions, particularly in embodied intelligence, legged locomotion/manipulation, wearable robotics, and human augmentation. I’m always happy to discuss research collaborations, academic opportunities, or interesting problems in these fields.
Education
- Ph.D. in intelligent robotics, Southern University of Science and Technology (Expected 2026)
- Thesis/Dissertation: [Design and Assistance Control of Huamn-Centaur System For Load-Carriage Walking]
- Advisor: Prof. Chenglong Fu
- B.S. in mechanical engineering, Chongqing University (2017 - 2021)
- Chinese National Scholarship (2020)
News
| Feb 16, 2026 | Our IJRR paper “Design, Modeling, Control, and Evaluation of a Wearable Centaur Robot for Load-carriage Walking Assistance” was covered by SUSTech News. Read more. |
|---|
Publications
-
 Locomotion control on human-centaur system with spherical joint interactionIEEE Robotics and Automation Letters, 2024
Locomotion control on human-centaur system with spherical joint interactionIEEE Robotics and Automation Letters, 2024
Research Projects
Teaching Assistant
- ME331: Robot Modling and Control (2021 Fall, with Prof. Chenglong Fu )
- ME5103: Walking Robots (2022 Spring, with Prof. Chenglong Fu )
- ME315: Advanced Mechanisms and Applications (2022 Fall, with Prof. Jian S. Dai)
Academic Service
- Journal reviewer IJRR, T-RO, TASE, RAL,
- Conference reviewer ICRA, IROS, ICDL, ICIRA